Robot Competition
My quest to find the same satisfaction that the Leviathan brought landed me in a robotics competition. I joined a team of 5 other engineers to design a robot that could achieve the goals set in front of us. I was exposed to many different forms of engineering, from software integration on an arduino to mechatronics and circuits. This further increased my love for mechanical engineering and the places it would take me.
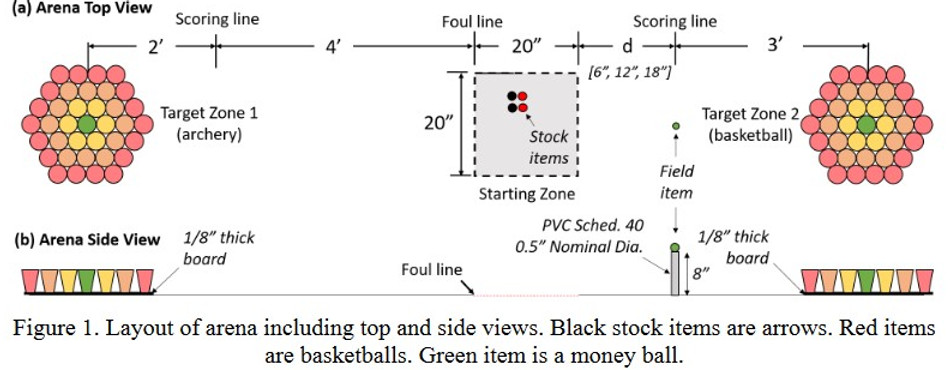
The goal of the competition was to score as many points as possible, with points being determined from how well each goal was achieved. One goal was to shoot 2 ping pong balls into the target zone, with each color cup representing a different point value. There was also a 'money ball', which was placed somewhere between the starting line and the second target zone. If this ball was retrieved and scored, it would award extra points. The other objective was the deliver 2 other ping pong ball into a different target zone, with a similar point value for the different color cups. These projectiles had to land directly in the cups, however, and could not bounce like the basketball shots.

This is the money ball function on the robot. Developed to score both the money ball and the return to starting zone points, this contraption would extend using drawer slides and a ratchet and pinon system, release the shooting mechanism to score the money ball, and then return to the starting position.
The picture below shows the robot fully built during one of the trial runs. Both the archery and the basketball functions were mounted on the top of the robot to allow for easy calibration and release. Each was tuned to shoot directly in the center of the target zone and the release mechanism was designed so that all of the balls were release simultaneously to have the best chance of scoring.
